Bevezetés a vezérlőrendszerekbe: működés, típusok és alkalmazások
Vezérlőrendszereket használ, amikor egy gép automatikusan állandó értéket tart, például hőmérsékletet, sebességet vagy szintet.Ez a cikk elmagyarázza, mi az a vezérlőrendszer, hogyan működnek együtt részei, és hogyan tartja a visszacsatolás helyesen a kimenetet.Látni fogja a rendszerek fő típusait és működésüket is.Az általános felhasználásokat, előnyöket és korlátokat tartalmazza.Katalógus
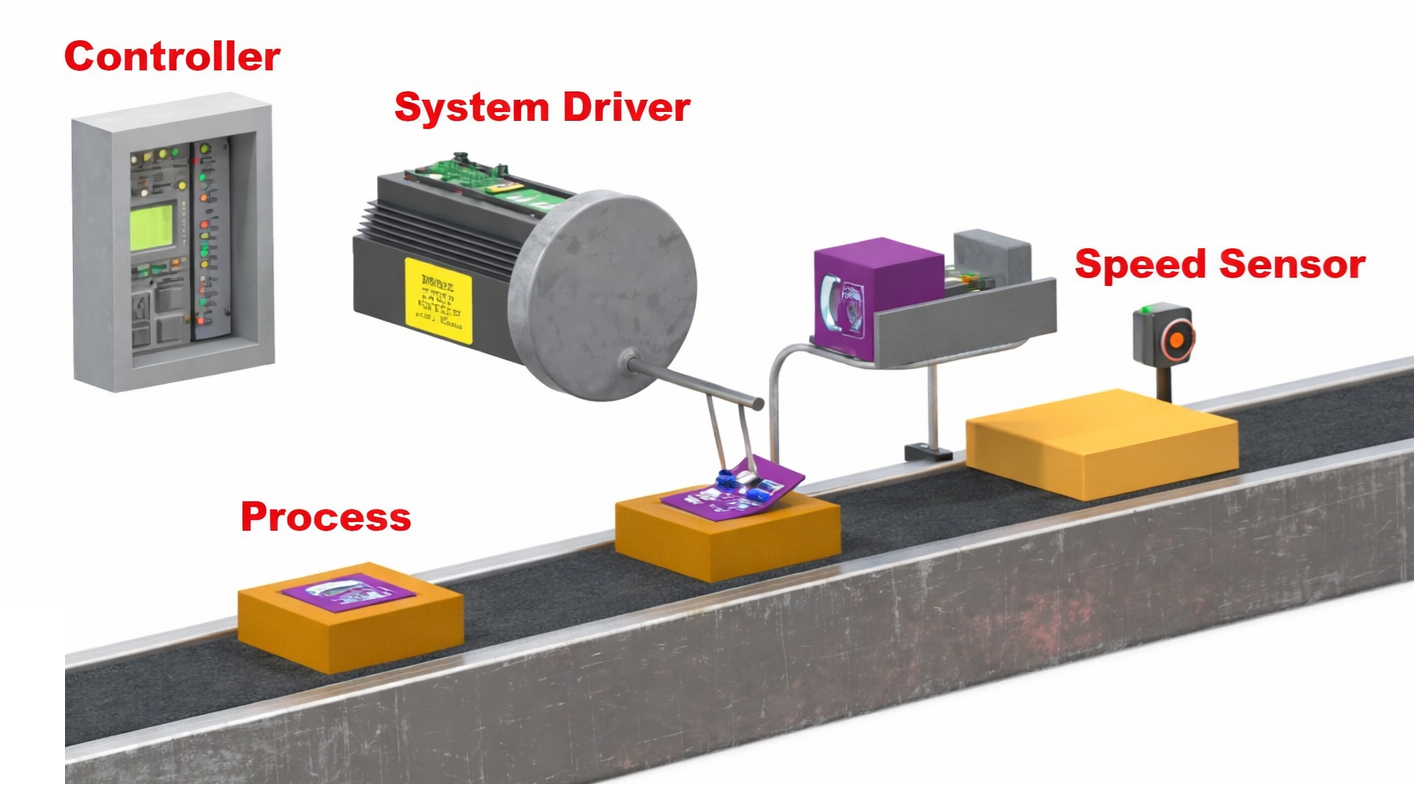
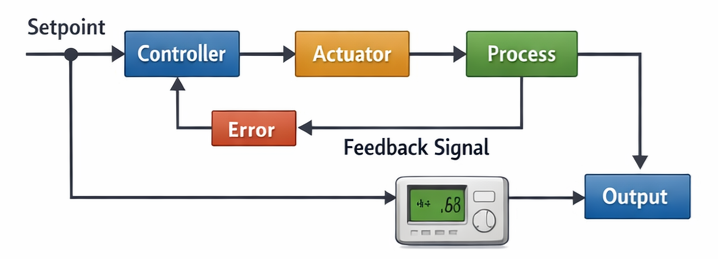
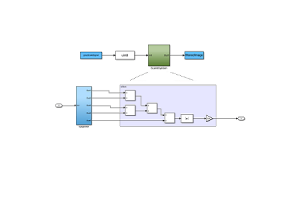
1. ábra Vezérlőrendszer példa
Mi az a vezérlőrendszer?
A vezérlőrendszer olyan rendszer, amely a mért értéket a kívánt célérték közelében tartja.Célja a folyamat automatikus beállítása, hogy a kimenet helyes maradjon még akkor is, ha a körülmények megváltoznak.Például egy szobatermosztát a beállított szint közelében tartja a hőmérsékletet, az autós tempomat pedig a kiválasztott sebességen tartja a járművet.A víztartály szintszabályozója a vízmagasságot is a kiválasztott jelölésen tartja.Egyszerűen fogalmazva, a vezérlőrendszer folyamatosan ellenőrzi és korrigálja a változót, hogy megfeleljen a kívánt értéknek.
A vezérlőrendszer alapelemei
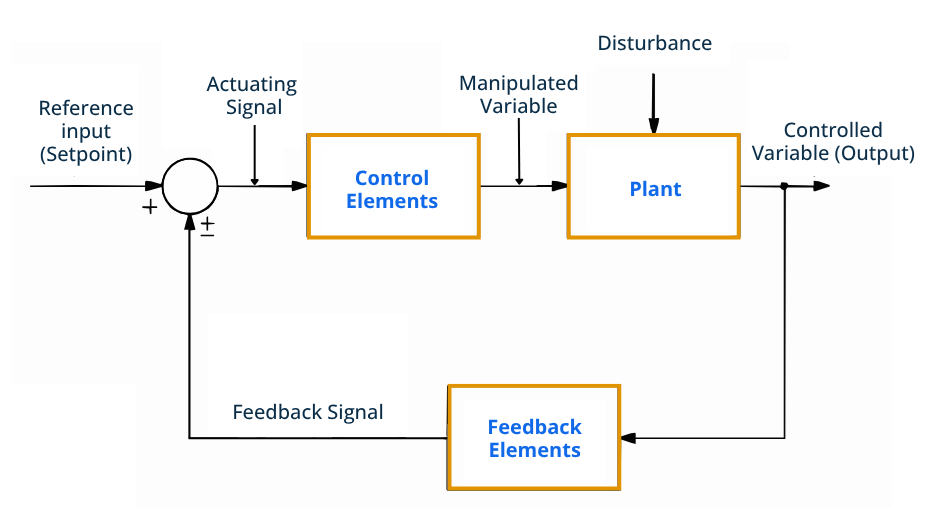
2. ábra: Vezérlőrendszer blokkdiagramja
A vezérlőrendszer több szabványos alkatrészből áll, amelyek mindegyike meghatározott feladatot lát el.
• Referencia bemenet (alapjel)
Ez az a kívánt érték, amelyet a rendszer megpróbál fenntartani.A kiválasztott célfeltételt képviseli.A rendszer mindig ehhez a referenciaértékhez viszonyítja a tényleges értéket.
• Működtető jel
Ez az a jel, amely a kívánt és a tényleges értékek összehasonlítása után keletkezik.Azt jelzi, hogy mennyi módosításra van szükség.A jel felkészíti a rendszert a korrekcióra.
• Vezérlőelemek
Ezek a részek kezelik a döntéshozatali folyamatot.A kapott jel alapján határozzák meg a korrekciós intézkedést.Az ebből a szakaszból származó kimenet előkészíti a folyamatot a beállításhoz.
• Manipulált változó
Ez a folyamat felé küldött, beállítható mennyiség.Ennek az értéknek a megváltoztatása befolyásolja a végső kimenetet.Ez az a változó, amelyet a rendszer közvetlenül változtathat.
• Növény
Az üzem a folyamat, amelyet irányítanak.Ez állítja elő a végső kimeneti értéket.A rendszer célja, hogy ezt a kimenetet a kívánt szinten tartsa.
• Zavar
Ez a folyamatot befolyásoló nem kívánt változás.El tudja tolni a kimenetet a kívánt értéktől.A rendszernek kompenzálnia kell.
• Vezérelt változó (kimenet)
Ez a folyamat tényleges mért eredménye.A rendszer jelenlegi állapotát mutatja.A cél az, hogy egyenlő legyen a referencia bemenettel.
• Visszajelzési elemek
Ezek mérik a kimenetet, és visszaküldik az információkat ellenőrzésre.Ezek biztosítják a rendszert az aktuális állapotnak.Ez lehetővé teszi a korrekció meghatározását.
• Visszajelzési jel
Ez a visszaadott információ a kimeneti értékről.A folyamat feltételét jelzi.A rendszer összehasonlításra használja.
Az ellenőrző rendszer működési elve
3. ábra: A vezérlőrendszer működési elve
A vezérlőrendszer működési elve a kívánt bemeneti érték megadásával kezdődik.A rendszer ezután összehasonlítja ezt az értéket a tényleges kimeneti értékkel.A köztük lévő különbséget hibajelzésnek nevezzük.Ha a hiba fennáll, a rendszer javító jelet generál.Ez a korrekció módosítja a folyamatot a hiba csökkentése érdekében.A kimenet folyamatosan változik, és ismételt ellenőrzésre kerül.A ciklus addig ismétlődik, amíg a kimenet közel megegyezik a kívánt értékkel.
Vezérlőrendszerek jellemzői
A vezérlőrendszerek értékelése aszerint történik, hogy mennyire jól teljesítenek működés közben.Ezek a jellemzők a rendszer válaszának minőségét és megbízhatóságát írják le.
|
Jellemzők |
Leírás |
|
Stabilitás |
A kimenet igen
nem tér el;zavar után visszaáll az állandó értékre |
|
Pontosság |
Végső hiba ≤
a beállított érték ±2-5%-a |
|
Precizitás |
Kimenet
eltérés ≤ ±1% ugyanazon bemenet mellett |
|
Válaszidő
|
Kezdeti
a reakció a mért késleltetési időn belül (td) megy végbe |
|
Rise Time |
Idő 10%-tól
a végső érték 90%-ára |
|
Elszámolási idő |
Belép és
±2%-os sávon belül marad |
|
Túllövés |
A csúcs meghaladja
végső érték %-os összeggel |
|
Állandósult állapot
Hiba |
Állandó
stabilizálás után fennmaradó eltolás |
|
Érzékenység |
ΔKimenet /
ΔParaméterváltási arány |
|
Robusztusság |
Fenntartja
zavarváltozás ellenére is működik |
|
Sávszélesség |
Működik
hatékonyan akár -3 dB vágási frekvenciáig |
|
Ismételhetőség |
Ugyanaz a bemenet
tűréshatáron belül ugyanazt a kimenetet produkálja |
|
Megbízhatóság |
Működik
hiba nélkül a névleges üzemidőre (MTBF) |
|
Csillapítás |
Oszcilláció
csillapítási arány ζ |
|
Sebesség
Válasz |
Teljes idő a
stabil állapotot elérni |
Vezérlőrendszerek típusai
A vezérlőrendszereket aszerint osztályozzák, hogy hogyan kezelik az információkat, a jeleket és a válaszviselkedést.Csoportosításuk a visszacsatolás használat, a jelforma és a matematikai viselkedés szerint történik.
Nyílt hurkú vezérlőrendszer
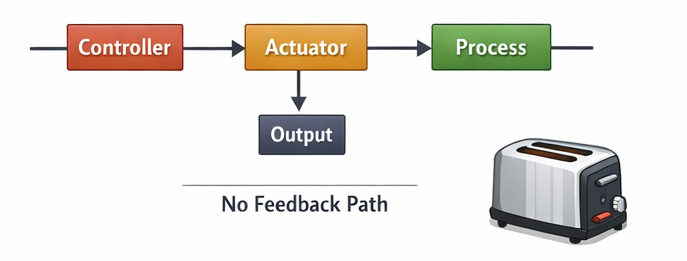
4. ábra Nyílt hurkú vezérlőrendszer diagram
A nyílt hurkú vezérlőrendszer olyan rendszer, amelyben a kimenet nem befolyásolja a vezérlési műveletet.A rendszer parancsot küld, és ellenőrzés nélkül feltételezi, hogy az eredmény helyes.Mivel nincs visszacsatolási út, nem tudja automatikusan kijavítani a hibákat vagy zavarokat.A teljesítmény elsősorban a megfelelő kalibrálástól és működési feltételektől függ.Ezek a rendszerek egyszerűek, olcsók és könnyen tervezhetők.A terhelés vagy a környezet változásai azonban befolyásolhatják a végeredményt.Gyakori példák közé tartozik az elektromos kenyérpirító időzítője, a mosógép időzítője és a rögzített öntözési időzítő.
Zárt hurkú vezérlőrendszer
5. ábra: A zárt hurkú vezérlőrendszer diagramja
A zárt hurkú vezérlőrendszer olyan rendszer, amely visszacsatolás segítségével állítja be automatikusan a kimenetet.A rendszer méri az eredményt, és összehasonlítja a kívánt értékkel.Ha eltérés jelenik meg, a hiba csökkentése érdekében korrekciót alkalmaznak.Ez a folyamatos beállítás pontos és stabil működést tesz lehetővé változó körülmények között is.A zárt hurkú rendszerek jobb pontosságot és megbízhatóságot biztosítanak, mint a nyílt hurkú rendszerek.Széles körben használják a modern automatikus vezérlési alkalmazásokban.Tipikus példák a légkondicionáló hőmérséklet-szabályozása, a jármű sebességtartója és az automatikus feszültségszabályozók.
Folyamatos idejű vezérlőrendszer
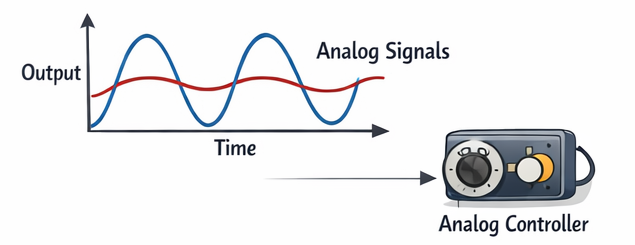
6. ábra Folyamatos idejű (analóg) vezérlőjel
A folyamatos idejű vezérlőrendszer az idő múlásával zökkenőmentesen változó jeleket dolgozza fel.A bemenet és a kimenet minden pillanatban megszakítás nélkül létezik.Ezek a rendszerek általában analóg elektromos vagy mechanikus jelekkel működnek.Mivel a jelek folyamatosak, a válasz is egyenletes és természetes.A folyamatos idejű rendszerek általában megtalálhatók a hagyományos analóg vezérlőkben.Azonnali reakciót igénylő fizikai folyamatokra alkalmasak.Ilyenek például az analóg sebességszabályozók, az audioerősítő hangerőszabályzója és a hidraulikus szelep helyzetszabályozása.
Diszkrét idejű vezérlőrendszer
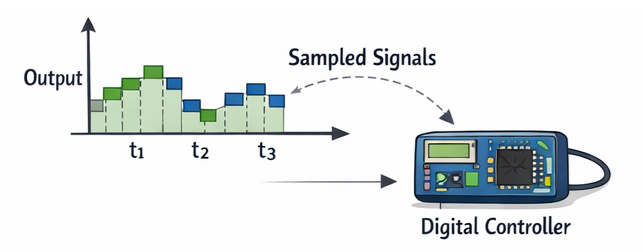
7. ábra: Diszkrét idejű (digitális) vezérlőjel
Egy diszkrét idejű vezérlőrendszer mintavételezett adatjelek felhasználásával működik.A rendszer csak meghatározott időközönként ellenőrzi és frissíti az értékeket.Ezeket a jeleket általában digitális vezérlők vagy mikroprocesszorok dolgozzák fel.A kimenet lépésről lépésre változik, nem pedig folyamatosan.Az ilyen rendszerek programozható működést és rugalmas beállítást tesznek lehetővé.Széles körben használják a modern elektronikus és számítógépes vezérlésben.Ilyen például a mikrokontroller alapú hőmérséklet-szabályozás, a digitális motorfordulatszám-szabályozás és az intelligens otthoni termosztátok.
Lineáris vezérlőrendszer

8. ábra: Lineáris rendszer bemenet-kimenet kapcsolat
A lineáris vezérlőrendszer a bemenet és a kimenet arányos viszonyát követi.Ha a bemenet megduplázódik, ugyanazon feltételek mellett a kimenet is megduplázódik.Ezek a rendszerek megfelelnek a szuperpozíció elvének, ahol a kombinált bemenetek kombinált kimeneteket hoznak létre.A lineáris viselkedés kiszámítható és egyszerű matematikai elemzést tesz lehetővé.A legtöbb elméleti vezérlési terv az egyszerűség kedvéért lineáris működést feltételez.A lineáris modellek segítenek a stabil és pontos rendszerek tervezésében.Ilyenek például a kis jelű elektronikus erősítők és a kis terhelésű motorvezérlő tartományok.
Nemlineáris vezérlőrendszer
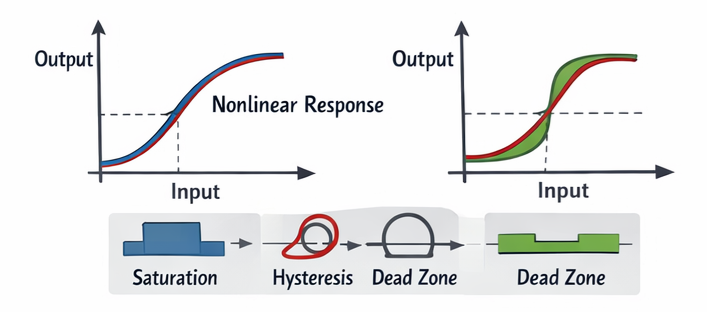
9. ábra: Nemlineáris rendszerreakció karakterisztika
A nemlineáris vezérlőrendszer kimenete nem arányos a bemenettel.A reakció a működési tartománytól vagy a körülményektől függően változik.A kis bemeneti változtatások nagy kimeneti eltéréseket eredményezhetnek, vagy egyáltalán nem változhatnak.Gyakran megjelennek olyan hatások, mint a telítettség, a hiszterézis és a holt zónák.Ezeket a rendszereket nehezebb elemezni, de pontosabban ábrázolják a fizikai folyamatokat.Sok rendszer természetesen nemlineárisan viselkedik.Ilyenek például a robotkarok mozgási korlátai, a mágneses aktuátor viselkedése és a szelepáramlás szabályozása szélsőséges helyzetekben.
A vezérlőrendszerek előnyei és hátrányai
A vezérlőrendszerek javítják a konzisztenciát és csökkentik a kézi erőkifejtést, ugyanakkor bonyolultságot és költségeket is jelentenek.
A vezérlőrendszerek előnyei
• A rendszer működés közben a kívánt érték közelében tartja a kimenetet.
• A kezelőknek nem kell folyamatosan kézzel beállítaniuk a berendezést.
• A gépek hosszú órákig működhetnek gyakori megállás nélkül.
• A rendszer automatikusan korrigálja a körülmények változásait.
• A működési állapot a panelről vagy a távoli kijelzőről ellenőrizhető.
A vezérlőrendszerek hátrányai
• Az üzembe helyezés költsége magasabb, mint az egyszerű kézi rendszerek esetében.
• Szakképzett munkaerőre van szükség a beállításhoz és a szervizeléshez.
• Az érzékelők és az elektronikus alkatrészek idővel meghibásodhatnak.
• A problémák okának megtalálása tovább tarthat.
• A rendszer a stabil elektromos áramtól függ.
Vezérlőrendszerek alkalmazásai
A vezérlőrendszereket mind az ipari automatizálásban, mind a mindennapi berendezésekben használják a megfelelő működés automatikus fenntartása érdekében.
1. Ipari gyártás
A gyártógépek állandó termékméreteket és minőséget biztosítanak.Az automatizált összeszerelő sorok szabályozást alkalmaznak az ismételhetőség biztosítása érdekében.Ez csökkenti a hulladékot és javítja a hatékonyságot.
2. Hőmérsékletszabályozás
A fűtő- és hűtőberendezések kényelmes környezeti feltételeket biztosítanak.Az épületek automatikus beállításra támaszkodnak a beltéri klíma stabilizálása érdekében.Ez javítja az energiahatékonyságot és a komfortérzetet.
3. Közlekedési rendszerek
A járművek sebesség- és stabilitásszabályozást használnak a gördülékenyebb működés érdekében.A modern autók tempomatot és tapadási rendszert tartalmaznak.Ezek javítják a vezetés biztonságát és teljesítményét.
4. Energiaellátó rendszerek
Az elektromos hálózatok szabályozzák a feszültség- és frekvenciaszinteket.A generátorok a terhelési igényekhez igazítják a kimenetet.Ez biztosítja a stabil áramellátást.
5. Robotika és automatizálás
A robotok pontos helymeghatározási és mozgási feladatokat hajtanak végre.Az automatizált gépek folyamatosan, nagy pontossággal működnek.Ez lehetővé teszi a fejlett gyártást.
6. Orvosi berendezések
Az eszközök a kezelés alatt ellenőrzött működési feltételeket tartanak fenn.A felügyeleti berendezések biztonságos határokon belül tartják az értékeket.Ez javítja a betegek biztonságát és megbízhatóságát.
7. Háztartási gépek
A mindennapi eszközök automatikusan kezelik a működési beállításokat.A mosógépek és a hűtőszekrények megfelelő működési feltételeket biztosítanak.Ez leegyszerűsíti a napi feladatokat.
8. Aerospace Systems
A repülőgépek és a drónok stabil repülési feltételeket biztosítanak.Az automatikus irányítás megtartja a helyes tájolást és magasságot.Ez támogatja a megbízható navigációt.
Vezérlőrendszer vs automatizálás vs beágyazott rendszerek
Ezek a technológiák szorosan kapcsolódnak egymáshoz, de különböző mérnöki célokat szolgálnak a modern elektronikai és ipari termékeken belül.
|
Funkció |
Irányítás
Rendszer |
Automatizálás |
Beágyazott
Rendszer |
|
Fő fókusz |
rendelete
változók |
Folyamat
végrehajtását |
Eszköz
működését |
|
Cél |
Karbantartás
kívánt értéket |
Végezzen feladatokat
automatikusan |
Fuss dedikált
funkciókat |
|
Hatály |
Specifikus
folyamat viselkedését |
Egész
munkafolyamat
|
Egyetlen
termék eszköz |
|
határozat
Képesség |
alapján
mért értékek |
alapján
programozott logika |
alapján
firmware |
|
Visszajelzés Használat |
Gyakran
szükséges |
Választható |
Választható |
|
Hardver típusa |
Érzékelők és
aktuátorok |
Gépek és
vezérlők |
Mikrokontroller
tábla |
|
Szoftver szerep |
Számítás
és korrekció |
Sorrendezés
és a koordináció |
Eszköz
vezérlési logika |
|
Válasz típusa |
Folyamatos
beállítás |
Feladat
végrehajtását |
Funkcionális működés |
|
Rendszer mérete |
Kicsi ahhoz
közepes |
Közepes a
nagy |
Nagyon kicsi |
|
Rugalmasság |
Mérsékelt |
Magas |
Korlátozott |
|
Idő
Követelmény |
Magas |
Mérsékelt |
Magas |
|
Alkalmazás
Szint |
Folyamat szintje |
Növényszint |
Termékszint |
|
Példa |
Hőmérséklet
irányítani |
Gyári
gyártósor |
Okos óra |
|
Integráció |
része
automatizálás |
Tartalmaz
vezérlőrendszerek |
Mindkettőt támogatja |
Következtetés
A vezérlőrendszerek úgy tartják fenn a stabilitást, hogy folyamatosan összehasonlítják a tényleges teljesítményt a célértékkel, és kijavítják az esetleges hibákat.Teljesítményük olyan alapvető elemektől függ, mint a visszacsatolás, a vezérlő tevékenysége és a szabályozott folyamat.Különböző osztályozások határozzák meg a jelek kezelésének módját és azt, hogy a rendszer milyen pontosan reagál a zavarokra.Ezeknek a képességeknek köszönhetően a vezérlőrendszereket széles körben alkalmazzák az iparban, a közlekedésben, az energetikában, az orvosi eszközökben és a mindennapi berendezésekben.
Rólunk
ALLELCO LIMITED
Olvass tovább
Gyors lekérdezés
Kérjük, küldjön egy kérdést, azonnal válaszolunk.
Gyakran Ismételt Kérdések [FAQ]
1. Mi a különbség a vezérlő és a vezérlőrendszer között?
A vezérlő csak a döntéshozó eszköz (mint a PLC vagy PID vezérlő).A vezérlőrendszer tartalmazza a vezérlőt, valamint az érzékelőket, aktuátorokat és a szabályozott folyamatot.
2. Mi a PID szabályozás és miért fontos?
A PID szabályozás arányos, integrál és derivált műveleteket használ a hiba gyors és zökkenőmentes minimalizálása érdekében.Javítja a stabilitást, a pontosságot és a válaszsebességet a legtöbb ipari rendszerben.
3. Miért oszcillálnak vagy vadásznak néha a vezérlőrendszerek?
Oszcilláció akkor fordul elő, ha a korrekciók túl agresszívek vagy késleltettek.A rossz hangolás, a lassú érzékelők vagy a túlzott erősítés a kimenet ismételt túllövést okoz.
4. Mi az aktor telítettsége?
Az aktuátor telítettsége akkor következik be, amikor az aktuátor eléri fizikai határát, és nem tudja tovább növelni a teljesítményt.Ez megakadályozza, hogy a rendszer kijavítsa a nagy hibákat.
5. Hogyan kezelik a vezérlőrendszerek a folyamatok késéseit?
Hangolási módszereket, szűrőket vagy prediktív algoritmusokat használnak a késleltetés kompenzálására, hogy a korrekció a megfelelő időben történjen.

4,7 kΩ ellenállás útmutató: Színkód, felhasználás, tesztelés és értékek összehasonlítása
2026/02/16 -en

Miniatűr áramköri megszakító (MCB): Működési elv, típusok, besorolások és kiválasztási útmutató
2026/02/15 -en
Népszerű hozzászólások
-

Komplex utasítás beállított számítógépek: Hogyan változtatták meg a számítástechnikát?
8000/04/18 -en 147772
-

USB-C pinout és funkciók
2000/04/18 -en 112009
-
A Xilinx Unified Simulation Primitívumok használata: Átfogó útmutató az FPGA tervezéséhez és szimulációjához
1600/04/18 -en 111351
-
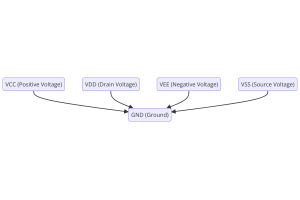
Tápfeszültségek az elektronikában: VCC, VDD, VEE, VSS és GND jelentése
0400/04/18 -en 83768
-

RJ45 Csatlakozó útmutató: Pinout, vezetékek, kábeltípusok és felhasználások
1970/01/1 -en 79565
-

A végső útmutató a vezetékes színkódokhoz a modern elektromos rendszerekben
Az, ahogyan az elektromos rendszereink a színeket használják, nem csak a megjelenéshez.Minden huzalszín most egy adott funkciót jelöl, megkönnyítve az elektromos alkatrészek azonosítását és kezelés...1970/01/1 -en 66960
-

Tisztító szelep útmutató: funkció, tünetek, tesztelés és a motor optimális teljesítményének cseréje
A tisztítószelep az autó rendszerének kulcsfontosságú része, amely segít a levegő tisztaságának megőrzésében az üzemanyag -gőzök kezelésével, mielőtt elmenekülhetnek a légkörbe.Ez nem csak a szenny...1970/01/1 -en 63100
-

Minőség (q) tényező: egyenletek és alkalmazások
A minőségi tényező, vagy a „Q” fontos, amikor ellenőrzi, hogy az induktorok és a rezonátorok hogyan működnek az elektronikus rendszerekben, amelyek rádiófrekvenciákat (RF) használnak.A 'Q' megméri,...1970/01/1 -en 63040
-
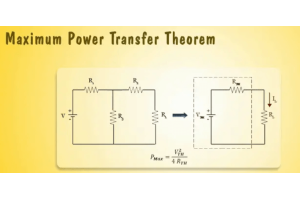
A csúcsteljesítmény elérése a maximális energiaátviteli tételgel
A maximális teljesítményátviteli tétel elmagyarázza, hogy a forrásból, például az akkumulátorból vagy a generátorból származó energia hogyan áramlik a csatlakoztatott terhelésbe.Megmutatja azt a po...1970/01/1 -en 54097
-

A23 akkumulátor specifikációi és kompatibilitása
Az A23 akkumulátor egy kicsi, hengeres alakú akkumulátor, nagy feszültséggel.A 23A, 23AE vagy MN21 néven is 12 voltos és sokkal magasabb, mint az AA vagy AAA akkumulátorok.Különleges kiala...1970/01/1 -en 52184
Forró cikkszám
-
MC9S08AC96CLKE
Freescale Semiconductor
IC MCU 8BIT 96KB FLASH 80LQFP
LNK458KG-TL
Power Integrations
IC LED DRVR OFFL TRIAC 1A 12ESOP
06031C332KAT7A
KYOCERA AVX
CAP CER 3300PF 100V X7R 0603
MC9S08DV16ACLF
NXP USA Inc.
IC MCU 8BIT 16KB FLASH 48LQFP
87CNQ020ASM
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 20V D618SM
1.5SMC36CA
Littelfuse Inc.
TVS DIODE 30.8VWM 49.9VC DO214AB
SN74AHC595QPWRQ1
Texas Instruments
IC SHIFT REGISTER SGL 8B 16TSSOP
SN74LVC2G86YZPR
Texas Instruments
IC GATE XOR 2CH 2-INP 8DSBGA
ST3222EBPR
STMicroelectronics
IC TRANSCEIVER FULL 2/2 20SSOP
TL431IDBVR
Texas Instruments
IC VREF SHUNT ADJ 2.2% SOT23-5
ESH2PC-E3/84A
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 150V 2A DO220AA
EN6382QI
Intel
DC DC CONVERTER 0.6-5.9V
20CJQ060TR
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 60V SOT223
AOT264L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 60V 19A/140A TO220
TLV9151SIDBVR
Texas Instruments
IC OPAMP GP 1 CIRCUIT SOT23-6
TLE4275S
Infineon Technologies
IC REG LIN 5V 450MA TO220-5-12
ADE7752ARZ
Analog Devices Inc.
IC ENERGY METERING DETEC 24-SOIC
AQV414SZ
Panasonic Electric Works
SSR RELAY SPST-NC 100MA 0-400V -

IS42S81600F-6TL
ISSI, Integrated Silicon Solution Inc
IC DRAM 128MBIT PAR 54TSOP II
ICL3226ECAZ
Renesas Electronics America Inc
IC TRANSCEIVER FULL 1/1 16SSOP
LQM2HPN1R0MJCL
Murata Electronics
FIXED IND 1UH 1.5A 108 MOHM SMD
GRM1885C1H682JA01J
Murata Electronics
CAP CER 6800PF 50V C0G/NP0 0603
TDA7498ETR
STMicroelectronics
IC AMP D MONO/STER 220W PWRSSO36
06033A121KAT4A
KYOCERA AVX
CAP CER 120PF 25V C0G/NP0 0603
VI-2TM-CY
Vicor Corporation
DC DC CONVERTER 10V 50W
AT86RF233-ZUR
Microchip Technology
IC RF TXRX+MCU 802.15.4 32VFQFN
87520-3S10BPLF
Amphenol ICC (FCI)
CONN RCPT USB2.0 TYPEA 4POS R/A
GCM2165C1H121JA16D
Murata Electronics
CAP CER 120PF 50V C0G/NP0 0805
MAX4657ESA
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NCX1 10OHM 8SOIC
LT1011AIS8#PBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 8SO
GRM0336T1E9R0DD01D
Murata Electronics
CAP CER 9PF 25V T2H 0201
SSL-LXA228GC-TR31
Lumex Opto/Components Inc.
LED GREEN CLEAR Z-BEND SMD
LMK316BJ335MD-T
Taiyo Yuden
CAP CER 3.3UF 10V X5R 1206
APT8014JLL
Microchip Technology
MOSFET N-CH 800V 42A ISOTOP
VJ0603Y471JXXCW1BC
Vishay Vitramon
CAP CER 470PF 25V X7R 0603
SBT-0260
KEMET
CMC 60UH 500MA 2LN TH -

AC0603KRX7R8BB105
YAGEO
CAP CER 1UF 25V X7R 0603
12101C105M4T4A
AVX Corporation
CAP CER 1UF 100V X7R 1210
MR25H40CDC
Everspin Technologies Inc.
IC RAM 4MBIT SPI 40MHZ 8DFN
C1608JB0J156M080AC
TDK Corporation
CAP CER 15UF 6.3V JB 0603
MAX499CWG
Analog Devices Inc./Maxim Integrated
IC BUFF/AMP RGB SPDT 24-SOIC
MMSZ5254BS-7-F
Diodes Incorporated
DIODE ZENER 27V 200MW SOD323
SN74CBT16244CDGGR
Texas Instruments
IC BUS SWITCH 4 X 1:1 48TSSOP
DAC0832LCN
Texas Instruments
IC DAC 8BIT A-OUT 20DIP
08055U3R0DAT2A
KYOCERA AVX
CAP CER 3PF 50V NP0 0805
SN74HC257ANSR
Texas Instruments
IC MULTIPLEXER 4 X 2:1 16SO
MIC5245-3.1BM5
Micrel Inc.
IC REG LINEAR MICROCAP CMOS LDO
LAA127LSTR
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 170MA 0-250V
VE-230-CW
Vicor Corporation
DC DC CONVERTER 5V 100W
SN74AXC4T245BQBR
Texas Instruments
IC TRANSCEIVER HALF 4/4 16WQFN
CGA5L2X5R1H684M160AA
TDK Corporation
CAP CER 0.68UF 50V X5R 1206
MDD95-12N1B
IXYS
DIODE MODULE 1.2KV 120A TO240AA
SRR1260A-100M
Bourns Inc.
FIXED IND 10UH 5.5A 20 MOHM SMD
1206ZC225KAZ2A
KYOCERA AVX
CAP CER 2.2UF 10V X7R 1206